二足歩行ロボットの自作用パーツ・キット|アルミ板 A5052P 板金加工サンプル
アルミ板の一般的な板金材料の A5052P の精密板金加工サンプルとして、個人様の趣味・ホビー用に人気がある二足歩行ロボットの自作用パーツ・キットの製作実例をご案内しています。
製品情報、板金加工内容・部品加工データの詳細、設計・加工のポイントなどをご紹介していますので、お見積もり・ご注文の際の参考にしてください。
■ 2足歩行ロボットの自作用パーツ・キット(個人様 趣味・ホビー用)
■ 製品サンプル写真(クリックで拡大)
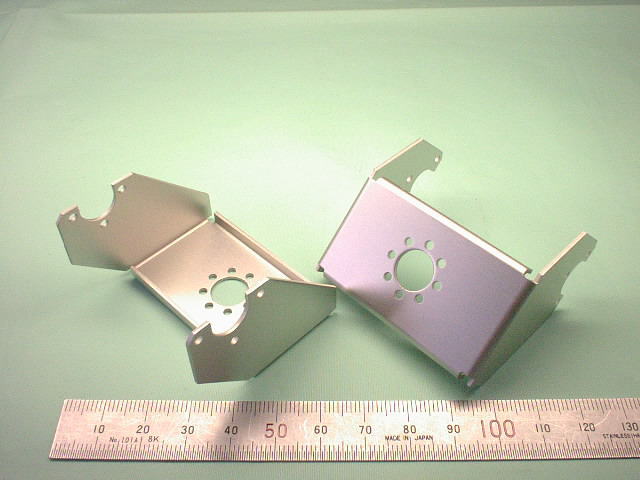
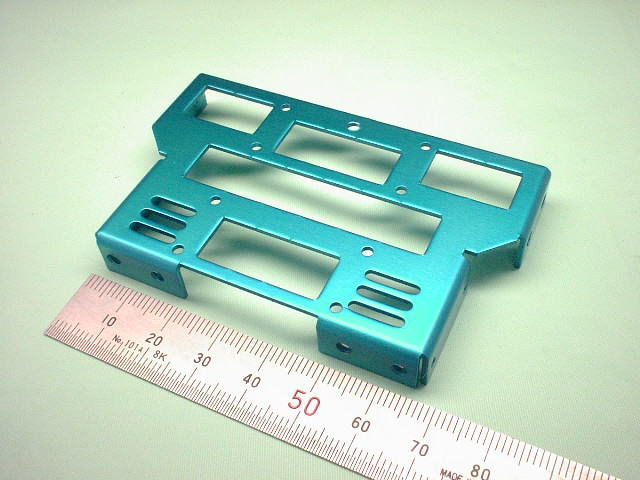 【例1】:アルミ板 A5052P t1.2 青アルマイト
【例1】:アルミ板 A5052P t1.2 青アルマイト
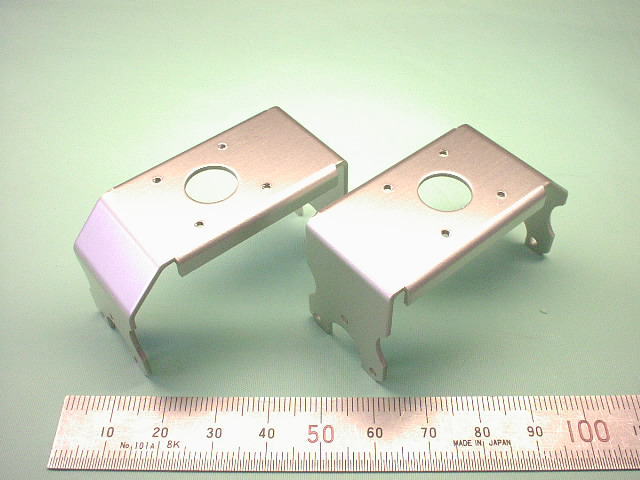
 【例2】:アルミ板 A5052P t1.2 青アルマイト
【例2】:アルミ板 A5052P t1.2 青アルマイト
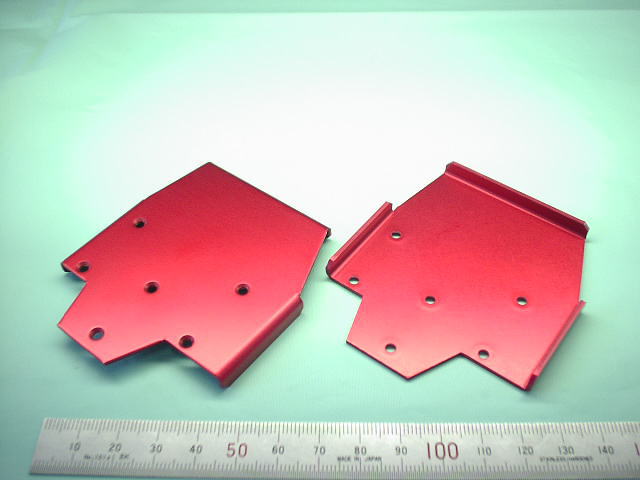
 【例3】:アルミ板 A5052P t1.2 赤アルマイト
【例3】:アルミ板 A5052P t1.2 赤アルマイト
 【例4】:アルミ板 A5052P t1.5 赤アルマイト
【例4】:アルミ板 A5052P t1.5 赤アルマイト
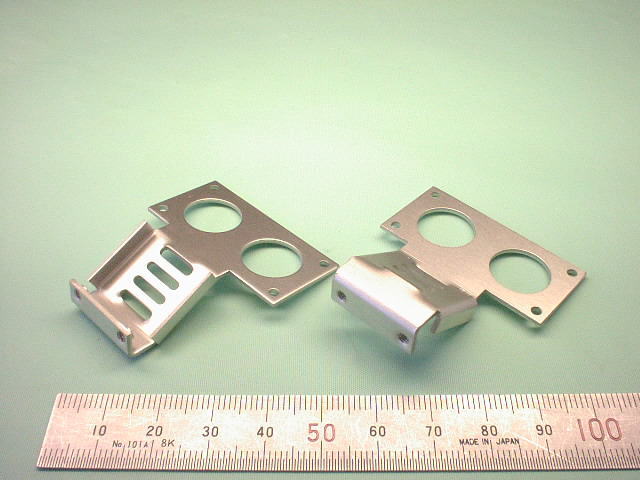
 【例5】:アルミ板 A5052P t1.2 白アルマイト
【例5】:アルミ板 A5052P t1.2 白アルマイト
 【例6】:アルミ板 A5052P t1.2 白アルマイト
【例6】:アルミ板 A5052P t1.2 白アルマイト
 【例7】:アルミ板 A5052P t1.2 白アルマイト
【例7】:アルミ板 A5052P t1.2 白アルマイト
 【例8】:アルミ板 A5052P t1.2 白アルマイト
【例8】:アルミ板 A5052P t1.2 白アルマイト
 【例9】:アルミ板 A5052P t1.2 白アルマイト
【例9】:アルミ板 A5052P t1.2 白アルマイト
 【例10】:アルミ板 A5052P t1.2 白アルマイト
【例10】:アルミ板 A5052P t1.2 白アルマイト
 【例11】:アルミ板 A5052P t1.2 白アルマイト
【例11】:アルミ板 A5052P t1.2 白アルマイト
 【例12】:アルミ板 A5052P t1.5 白アルマイト
【例12】:アルミ板 A5052P t1.5 白アルマイト
 【例13】:アルミ板 A5052P t2.5 赤アルマイト
【例13】:アルミ板 A5052P t2.5 赤アルマイト
■ 製品情報・加工データ詳細
- 加工カテゴリー : 精密板金加工
- 製品名称 : ホビー用自作二足歩行ロボット用パーツ
- お客様 : 個人様向け
- 製品用途 : 個人様のご趣味で利用。自作ロボット用の構成部品。
- 設計者 : お客様
- 加工用図面形式 : CAD作図ファイル図面(DXF形式)
- 製品構成部品点数 : 37点(自作二足歩行ロボット1体を構成するパーツ点数)
- 組立方法 : ネジ止め(各パーツの組立)
- 製品概略サイズ : (各パーツの概略サイズは割愛)
- 素材材質・材料 : アルミ板 A5052P
- 板厚 : 例1〜例3及び例5〜例11:t1.2mm/例4、例12:t1.5/例13:t2.5
- 表面処理 : 白アルマイト/青アルマイト/赤アルマイト(1)
- 製作数量 : 各パーツ 1個〜4個
- ブランク加工方法 : タレットパンチプレス(NCT)(2)
- 曲げ加工内容: プレスブレーキ曲げ(3)
- 曲げ箇所数(例1/例2/例3/例4/例5) : 4箇所/1箇所/2箇所/3箇所/10箇所
- 曲げ箇所数(例6/例7/例8/例9) : 5箇所/2箇所/3箇所/4箇所
- 曲げ箇所数(例10/例11/例12/例13) : 3箇所/3箇所/2箇所/2箇所
- 絞り加工 : なし
- 穴加工方法 : プレス抜き(タレパン(2))、ドリル(皿座ぐり加工)
- 穴加工数(例1) : 8-φ2.15穴、6-φ2.4×10長丸穴、角穴(矩形穴)4個
- 穴加工数(例2) : 8-φ2.15穴、3-φ3穴、φ10穴
- 穴加工数(例3) : 10-φ2.15穴
- 穴加工数(例4) : 6-M2用皿穴
- 穴加工数(例5) : 12-φ2.15穴、φ10穴、2-20×20角穴
- 穴加工数(例6) : 6-φ2.15穴、φ10穴
- 穴加工数(例8) : 4-φ2.15穴、2-φ13穴、4-φ2.4×10長丸穴
- 穴加工数(例9) : 14-φ2.15穴、φ10穴
- 穴加工数(例10) : 3-φ2.4×10長丸穴
- 穴加工数(例11) : 4-φ2.15穴、2-φ13穴、3-φ2.4×10長丸穴
- 穴加工数(例12) : 17×20角穴、12-M2用皿穴、異形穴
- 穴加工数(例13) : 1-φ6.2穴
- タップ加工数(例1) : 4-M2、9-M3
- タップ加工数(例3) : 6-M2
- タップ加工数(例5) : 17-M2
- タップ加工数(例6) : 4-M2
- タップ加工数(例7) : 4-M2、8-M3
- タップ加工数(例8) : 2-M2
- タップ加工数(例10) : 2-M2、4-M3
- タップ加工数(例11) : 2-M2、4-M3
- タップ加工数(例12) : 14-M2
- タップ加工数(例13) : 1-M4
- 溶接箇所 : なし
- 溶接後の表面処理 : −
- 図面指示の特定寸法公差 : ±0.1程度(組立に関わる寸法など)
- 図面指示なき寸法公差 : 板金加工品の一般公差(JIS B 0408-B(4) 打抜き・曲げ・絞り)
- 金型又は簡易ジグ製作の要否 : 不用
- 加工難易度 :

- 材料費価格(材料コスト) :

- 加工賃価格(加工コスト) :
- 表面処理価格(表面処理コスト) :
- トータル価格(トータルコスト) :

- 納期 : (注文後営業日18日以上程度)
- 評価(満足度) :

■ 注記(用語の説明)
- 注(1).アルマイト(アルマイト処理)
- アルミニウムの表面を陽極として主に強酸中で水の電気分解により表面を酸化させてコーティングする技術の総称で、陽極酸化処理とも言うアルミの表面処理方法。
アルミニウムの耐食性や耐摩耗性の向上や、さまざまな着色をして装飾することなどを目的とした表面処理。1929年に理化学研究所で開発された登録商標(商品名)であるが、現在では、アルミニウムの陽極酸化皮膜、或いは皮膜された製品の総称として広く一般に用いられている。 - 注(2).タレットパンチプレス(タレパン、NCT) 参考英語:Turret punch press
- 通称”タレパン”又は”NCT”とも言われ、板金加工に一般によく使われるプレス機械の一種。
形状の異なった多数の金型を円状または扇状の「タレット」とよばれる金型ホルダーに配置し、NC制御によって任意の金型をスライド下部に回転させ、素材の所定の位置に所定の打抜き作業ができるクランクプレス(クランク機構によってスライドを駆動するプレス)。
板金加工における薄板のブランク加工(外形や抜き穴の加工)を自動で行うことができる機械(参考写真以下)。

- 注(3).ブレスブレーキ曲げ(ベンダー加工)
- 鋼板・板材を曲げ加工すること。一般にV型のダイに乗せた板材をプレス加圧し、塑性変形させて任意の角度に曲げる。板金加工品の完成度は、曲げ加工の精度に拠るところが大きく、板金の基本的かつ重要な加工工程の一つ。以下のような機械で曲げ加工する。

- 注(4).JIS B 0408-B
- 金属プレス加工品(金属板を打抜き・曲げ・絞りによってプレス加工したもの)の普通寸法公差(特に図面に指示のない寸法の公差、一般公差)は、JIS B 0408(金属プレス加工品の普通寸法公差)に規定される等級”B級”によるという意味。各等級の普通寸法許容差は以下。
■ 二足歩行ロボットの自作用パーツの概略図面、設計・加工のポイントなど
■ 概略図、設計・加工のポイント
上記の二足歩行ロボットの自作用パーツの各部品の概略設計図面・イメージ図は、それぞれ以下のようになります。
2足歩行ロボットは、自立しなければならないことなどから一般に軽量であることが求められ、なおかつ、歩行という動作を伴うため、ロボットを構成する各部品にはある程度の強度も必要となることから、パーツの材料にはアルミ(アルミニウム合金)が利用されることが多く、この二足歩行ロボットパーツにも全てアルミ(A5052P)が利用されています。
【例1〜例13の二足歩行ロボット自作用パーツの概略図・イメージ図】
これらの各パーツが2足歩行ロボットのサーボ用フレームやボディ、関節、骨格部分などの一部を構成しており、各パーツを組み立てることによって以下のような組立図および完成イメージ図の二足歩行ロボットになります。
この2足歩行ロボットは、個人のお客様が趣味で全てのパーツ・部品をオリジナルで設計したものであり、その各パーツの製作・加工を板金加工eyeがお引き受けして完成したオリジナルの自作ロボットです。
【ホビー用2足歩行ロボットの組立図】
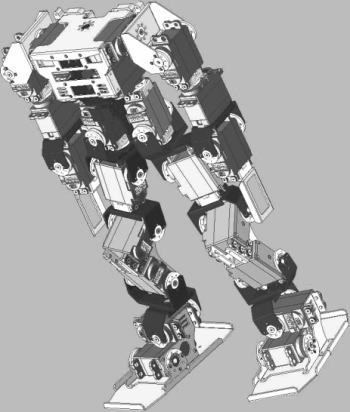
【ホビー用二足歩行ロボットの完成イメージ図】
このようなホビー用の二足歩行ロボットは、最近ではさまざまなタイプのロボットが商品として開発され、組立キットとして広く販売されています。
板金加工eyeでは、組立キットとして二足歩行ロボットの製造・販売は行っておりませんが、この例のように世界に一つしかないオリジナルのロボットを自ら設計して自作したいという方のために、設計図面からの部品加工をお引き受けすることで積極的にお手伝いをいたします。

